
S O N
N G U Y E N
Bio
I love all kinds of machines, especially robots. From early ages, I was keen on remote-control models including classic aircraft, helicopters, submarines, boats, and cars for both building and playing. Now, I work with machines, play with machines, and earn money from them. Some of my products, such as mini-CNC machines and auto control systems, have been commercialized. I also pursue another dream of making games, for example, the mini soccer robot controlled by smartphones. Besides, sport, books, and travel attract me as well.
My academic career started at the Department of Aerospace and Engineering, Military Technical Academy, Vietnam, where I studied mechatronics engineering and participated in robotics competitions such as the ABU Robocon Contest. After my BS, I worked as a researcher, and a lecturer at the Ho Chi Minh City University of Transport, Vietnam. At the same time, I got MS in Control Engineering and Automation. I led a variety of science projects focusing on robotics, auto control theories, and smart-engineering solutions with my colleagues and students. My achievements were remarked by the best young lecture award in 2015. The research path continues to widen when I become a research assistant in the ARA lab, University of Nevada, Reno, USA. Here, I develop novel generations of robots for steel bridge inspection. I am excited to realize my plans and dreams in this nation to become a Robotic Developer.
Conference
1. H. Ahmed, S. T. Nguyen, Duc La, Chuong P Le and H. M. La. Multi-directional Bicycle Robot for Bridge Inspection with Steel Defect Detection System. the 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), October 23-27, 2022, Kyoto, Japan (Best paper finalist)
2. Cadence Motley, Son Nguyen, Hung La, Design of A High Strength Multi-Steering Climbing Robot for Steel Bridge Inspection, Conference: 2022 IEEE/SICE International Symposium on System Integration (SII). Jan. 9-12, 2022.
3. Pham Anh, Cadence Motley, Son Nguyen, Hung La, A Robust and Reliable Climbing Robot for Steel Structure Inspection, Conference: 2022 IEEE/SICE International Symposium on System Integration (SII). Jan. 9-12, 2022. (Best paper finalist)
4. Yu Otsuki, Son Nguyen, H. M. La, Yang Wang, Autonomous Ultrasonic Thickness Measurement using a Steel Climbing Mobile Robot Integrated with Martlet Wireless Sensing. Proceeding of the ASNT’s 30th Research Symposium (ASNT30), June 20-23, 2022, St. Louis, Missouri, USA
5. S. T. Nguyen, H Nguyen, S. T . Bui, V. A. Ho, and H. M. La. An Agile Bicycle-like Robot for Complex Steel Structure Inspection, the 2022 IEEE International Conference on Robotics and Automation (ICRA), May 23-May 27, 2022, Philadelphia, USA
6. H-D. Bui, S. T. Nguyen, U-H. Billah, C. Le, A. Tavakkoli, H. M. La. Control Framework for a Hybrid-steel Bridge Inspection Robot. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, Nevada, USA, October 25 – 29, 2020 (pdf)
7. S. T. Nguyen, A. Q. Pham, Cadence Motley, and H. M. La, A Practical Climbing Robot For Steel Bridge Inspection. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, May 31 - June 4, 2020 (pdf)
8. S. T. Nguyen, and H. M. La. Roller Chain-Like Robot For Steel Bridge Inspection. In Proceedings of the 9th International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII-9), August 4-7, St. Louis, Missouri, 2019. (pdf)
9. S. T. Nguyen, H. M. La. Development of a Steel Bridge Climbing Robot. In the Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, November 3 – 8, 2019 (pdf). (the ABB Best Student Paper Award, and the Best Paper Award on Safety, Security, and Rescue Robotics) (link)
Journal
1. S. Nguyen and H. M. La. A Climbing Robot for Steel Bridge Inspection. Journal of Intelligent & Robotic Systems, Springer Publisher, 102, 75 (2021). https://doi.org/10.1007/s10846-020-01266-1
2. Son, N. T and Phuong, N. X, (2015). Fuzzy-PID algorithm control for Heli2DOF. European Journal of Engineering and Technology, 3 (7), 16-29, Vol. 3 No. 7, 2015 ISSN 2056-5860. (pdf)
4. Son, N. T and Phuong, N. X. (2017) Hexacopter dynamic and control methods, Journal of transport, 2 (7), 10-14, Vol.3, 5, 2017, ISSN 1859-4263. (pdf)
5. Son, N. T, and Vuong, D. D (2016) Fabrication of DC Motor experimental Model, Journal of transport, 2 (3), 34-38, Vol.5, 5, 2016, ISSN 1859-4263. (pdf)
6. Tuan, T. A, and Son, N. T (2018) Fabrication of rear car camera connected smartphone application, Journal of transport, 5 (7), 20-23, Vol.1, 5, 2018, ISSN 1859-4263. (pdf)

Projects

Interests & Hobbies
Flying & Underwater Robot
Muticopter, airplane, Hybrid drone
Mini Submarine, ROV
Mobile & Climbing Robots
Mecanum & Omni robots, tank robot, legged robot
Worming robot
Smart solutions for Life
Hybrid-foldable 2 wheels vehical
CNC machines
Designing, manufacturing and trading CNC machines (mill 3, 4, 5 axis, foam cutting, 3D printer, laser cutting)
Auto control systems
Heli 2DOF, Quad 3DOF, DC motor, Beam & ball...
RC hobby
Classic airplane, helicopter, car, boat, submarine, drone racing
Game (Developer)
Soccer, boxing, shooting, racing robotic games
Other
Sport (soccer, gym, swimming), science books, novels, travel, static models (Asian classic building, vehicle), meditation, aquarium, vivarium, resin art,
(Main Tasks: Design and Development of Hardware and Controller Firmware)
“Design Robotic Arm: SCARA 3DOF” of Department of Aerospace, Military Technical Academy, 2009
“Design and Control of Quadrotor” of Department of Aerospace, Military Technical Academy, 2011.
“Development of Quadcopter 3DOF Model for Control Theory Research” of Ho Chi Minh City University of Transport, 2013.
“Development of Helicopter 2DOF Model for Control Theory Research” of Ho Chi Minh City University of Transport, 2014.
“Green Solution for Two Wheel Vehicles” of Ho Chi Minh City University of Transport, 2015.
“Development of A Climbing Robot for Internal Pipe Inspection” of Ho Chi Minh City University of Transport, 2016.
“Development of Life-Ring Delivery System” of Ho Chi Minh City University of Transport, 2017.
"Design and Development of Robotic Systems for Automated Inspection of Steel Structures and Bridges", ARA lab, Department of Computer Science and Engineering, University of Nevada, Reno, NV, USA, from 01/2019.
"Socobot - Open source Robotic platform for gaming and education", Sontag 2020, hosted by Business School, University of Nevada, Reno
Nguyen Thanh Son
Heli 2DOF Fuzzy PI & D
Heli2DOF model is designed in the laboratory for studying of basic problem in the helicopter control. Due to its mechanical structure, the helicopter has itself created the unwanted moments while operating that effect to the flight. The movement in center of gravity will cause disturbance torques in flight, which makes the helicopter dive downward/ upward or negative change in the altitude. This is because the body of the helicopter is similar to a pendulum hanging from the main rotor; any changes of center of gravity (CG) definitely cause changes in this angle and disturbance. This issue should be controlled by the automatic controller in order to reduce the burden on the flight operator. This paper presents the idea of the Algorithms of PID combined with Fuzzy that solve this issue, also it is stability assistance of the system, even there is the disturbance of aircraft gravity. The authors suggest Fuzzy logic controller in order to adjust the PID coefficients for the purpose of its efficiency with the nonlinearity of the system in the Pitch (𝛉) and Yaw (𝛙) angle position control. Under the disturbance wind causing the loss of control of aerodynamics force of the propeller, nonlinearity of the system is very high; however, the controller ensures the control of system. This idea has been successfully on this Heli2DOF model.
Quadcopter 3DOF PID
The Quadcopter 3 DOF experiment provides an economical testbed to understand and develop control laws for flight dynamics and control of vehicles with vertical lift-off.
The Quad 3DOF consists of a planar round frame with four propellers. The frame is mounted on three degrees of freedom pivot joint that enables the body to rotate about the roll, pitch and yaw axes. The propellers are driven by four BLDC motors that are mounted at the vertices of the frame. The propellers generate a lift force that can be used to directly control the pitch and roll angles. The total torque generated by the propeller motors causes the body to move about the yaw axis. Two of the propellers are counter-rotating so that the total torque in the system is balanced when the thrust of the four propellers is approximately equal.
Life-Ring Hexa-copter Delivery System
Design choices on the Hexacopter platform, battery, flotation device, location/path/operation range was made for the best possible drone system for rescue. A drone system design, business case, cost model, and case study for a specific beach was developed.
The proposed design to delivery flotation devices is a delivery drone. It will incorporate a separately designed flotation device holder and tether system. There will be 2 cameras mounted to the drone, one which will be forward-facing and provide the pilot with a video feed of the direction the drone is flying. The other will be downward facing and provide the pilot with a view over the drowning victim to allow for accurate delivery. The pilot controller will be an off the shelf commercial controller. The user will provide the flotation device.
Pipe Inspection Robot
The research introduces a pipe robot in many different applications. The robot includes a moving part along the length of the pipes is responsible for observing inside the pipe by the camera system, guiding control and creating traction on the tube 150 -230mm by the motion of the wheels. Most robots designed for underground sewer pipes, the method of transmitting information and energy by wires. In this project, the research-team focused on designing solutions for this type of upper-ground pipe robots, wireless information transmission and saved battery power.
Adaptable steel climbing tank-like robot
Motivated by a high demand for automated inspection of civil infrastructure, this work presents an efficient design and development of a tank-like robot for structural health monitoring. Unlike most existing magnetic wheeled mobile robot designs, which may be suitable for climbing on flat steel surface, our proposed tank-like robot design uses reciprocating mechanism and roller-chains to make it capable of climbing on different structural shapes (e.g., cylinder, cube) with coated or non-coated steel surfaces. The developed robot is able to pass through the joints and transition from one surface to the other (e.g., from flat to curving surfaces).
Taking into account several strict considerations (including tight dimension, efficient adhesion and climbing flexibility) to adapt with various shapes of steel structures, a prototype tank-like robot integrating multiple sensors (hall-effects, sonars, inertial measurement unit, Eddy current and cameras), has been developed. Rigorous analysis of robot kinematics, adhesion force, sliding failure and turn-over failure has been conducted to demonstrate the stability of the proposed design. Mechanical and magnetic force analysis together with sliding/turn-over failure investigation can serve as an useful framework for designing various steel climbing robots in the future. The robot is integrated with cameras and Eddy current sensor for visual and in-depth fatigue crack inspection of steel structures. Experimental results and field deployments confirm the adhesion, climbing, inspection capability of the developed robot.
Rolling Steel Climbing Robot
This research presents a novel design of steel bridge/structure climbing robot inspired by water-drop movement on lotus leaves . Compared to most existing robots designed to work on particular surface contour of steel structures such as flat or curving only, the proposed roller chain-like robot can implement and transfer smoothly on any kind of steel surfaces. The developed robot can be applied to inspection tasks for steel bridges with complicated structures. The robot is able to carry cameras, sensors for visual and specialized examination. Rigorous analysis of robot kinematics, adhesion force and turn-over failure has been conducted to demonstrate the stability of the proposed design. Mechanical and magnetic force analysis together with turn-over failure investigation can serve as an useful framework for designing various steel climbing robots in the future. Experimental results and field deployments prove the adhesion, climbing, inspection capability of the developed robot.



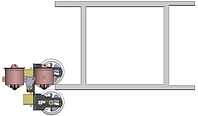
An Agile Robot for Complex Steel Structure Inspection
This research presents a compact design of a bicycle-like robot for inspecting general ferromagnetic structures, including complex-shaped structures. The robot has the most significant advantage of being mechanically simple with high mobility. The locomotion concept relies on arranging two magnetic wheels in a bicycle-like configuration with two independent steering actuators, allowing the robot to possess multi-directional mobility. Additionally, a reciprocating mechanism enables the robot to change its shape to pass obstacles. The robot can also naturally adapt to uneven and complex surfaces of steel structures thanks to a dynamic joint. We demonstrate the usage of our robot with an ultrasonic sensor for steel thickness measurement with a practical deployment mechanism
Hybrid (Mobile & Worming) Steel Climbing Robot
The combination of a variety of steel climbing robot concepts into a unified design came with its own set of challenges since the parameters for these features sometimes conflicted. An extensive amount of design and analysis work was performed by the ARA lab in order to find a carefully tuned balance between the implemented features on the ARA robot and general functionality. Having successfully managed to implement this conglomerate of features represents a breakthrough to the industry of steel inspection robots as the ARA lab robot is capable of traversing most complex geometries found on steel structures while still maintaining its ability to efficiently travel along with these structures; a feat yet to be done until now.

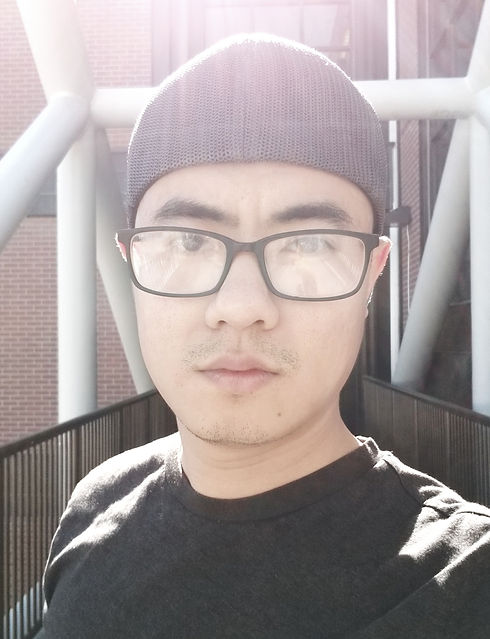
Hybrid (mobile & flying) Steel Bridge Inspection Robot






Cubic Robot
Prototype Version 1.0
Prototype version 2.0
Figure 1. The overall design of hybrid robot system version 2.0. Dimension is 1.5 x 1.5 x 15 meters. Weight is 25kg. Payload is10kg. Flying time is 2 hours by powered a hydrogen fuel battery. Tether power can provide longer working times in less complex structures.
Figure 2. a) Robot shape is adjustable to adaptive landing on surfaces. b) 360 degrees manipulator on a loop conveyor. More actuators can add on or replace depending on tasks. c) Buoy and zippermast integration for underwater deployment.





Skills
Programing
Matlab, C++, Python
ROS.
Microprocessor (Pic, Arduino, STM32Fxxx).
STM32Fxxx with Intelligent, Linear, and Nonlinear Control Algorithm (Fuzzy, PID, etc.) in Matlab/Simulink environment.
Hardware Design
CAD, CAM software (SolidWork, SolidCam, Mach3, etc.)
©2019 by nguyen thanh son. Proudly created with Wix.com